当我们提起自动驾驶系统,熟悉智能汽车的你会首先想到谁?一定是特斯拉Autopilot,也就是我们常说的AP。

AP能有如此口碑的原因很简单,它确实是当下可用性最高、最成熟的自动驾驶辅助系统,没有之一。
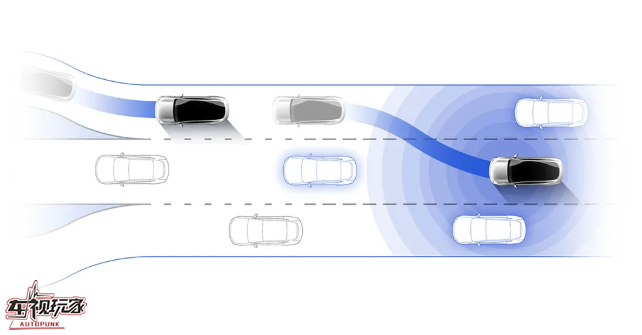
使用AP你可以办到很多曾经难以想象的事,比如在高速公路上全自动导航(NOA)、后车紧急避让,将来甚至还可以实现车辆召唤和全自动停车。
特斯拉为什么这么强?
想要做到上面说的这一切,需要一整套非常复杂的系统,性能强劲的计算平台、精妙可控的算法、丰富的传感器,缺一不可。
对特斯拉来说,自动驾驶系统的架构是从车辆设计之初就开始考虑的。比如Model 3 ,发布之初就明确表示将搭载全自动驾驶(FSD)功能,并且在2017年推出的第一批量产车上就搭载了AP。
特斯拉的设计理念是非常超前的,从2016年10月起,特斯拉为旗下所有车型都配备了专门用于Autopilot的硬件系统,名为Hardware 2.0(HW2.0),其中作为核心的计算平台可以说是一台专为神经网络和视觉识别技术而打造的“超级计算机”。
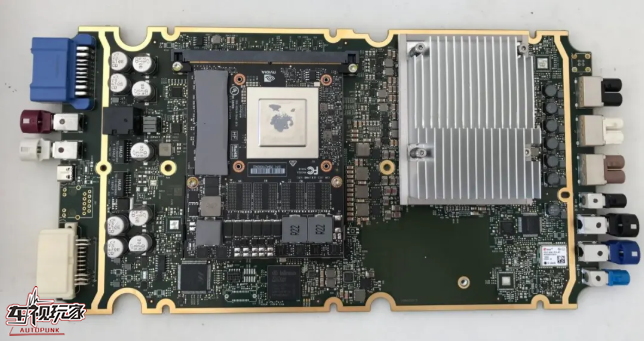
这台“超算”基于英伟达DRIVE PX 2车载电脑打造,拥有一颗Tegra Parker CPU和一颗Pascal GPU,单精度算力可达4 TFLOPS,也就是每秒进行超过4万亿次的单精度浮点运算。这就让它拥有了超过每秒300帧的图像处理能力,可以处理来自多个摄像头和传感器,如雷达、激光雷达、超声波等多种传感器的数据。
这还没完,在2018年末,特斯拉又推出了新一代自动驾驶硬件 Hardware 3.0,与 HW2.0 相比,HW3.0拥有了超过每秒2300帧的图像处理能力,性能再次一骑绝尘。
对其他厂商来说,“自动驾驶”或者说“高级辅助驾驶”只是一个可以给车辆“增值”的附加功能,这就导致这些车的辅助驾驶功能的天花板很低,只能实现一些预设的功能。例如,L2级就只能实现L2级的车道居中、但难以通过软件升级实现L3级的自动导航变道超车,除非对车辆进行大的硬件升级。
这很好理解,传统厂商的车辆并没有像特斯拉一样为每一辆车都配备性能强大的硬件,在硬件的选择上依然是成本最优,算力可以满足当下的需求就可以。这样一来,即便日后厂商有足够的能力研发出了更高等级的算法,但高级的算法高级的功能自然需要更强的运算能力,受限于硬件的性能还是无法升级实现。
传统厂商的做法,放在之前是可行的,但随着人们对于智能化生活的追求,“自动驾驶”正在逐步从概念技术转变为刚需,这种做法已逐渐不能满足消费者的需求。
小鹏如何发起挑战?
足够强的算力基础
小鹏汽车无疑是意识到了这一点,对于即将上市的小鹏P7来说,XPILOT 3.0高级辅助驾驶系统是它的一个核心卖点。按照官方的说法,它可以实现L3级别自动驾驶场景体验,包括前文说到的全自动高速导航等等。
能让等同于L3级别的自动驾驶落地,小鹏P7应该是国内头一个,而它之所以可以达成,首先就是给自动驾驶系统准备了充足的算力。
小鹏P7所搭载的XPILOT 3.0也配备了性能强劲的专用硬件,其核心是来自英伟达的DRIVE Xavier。是不是很眼熟?没错,前文讲到的特斯拉HW 2.0的核心是DRIVE PX 2,小鹏用的这个DRIVE Xavier就是它的升级版。
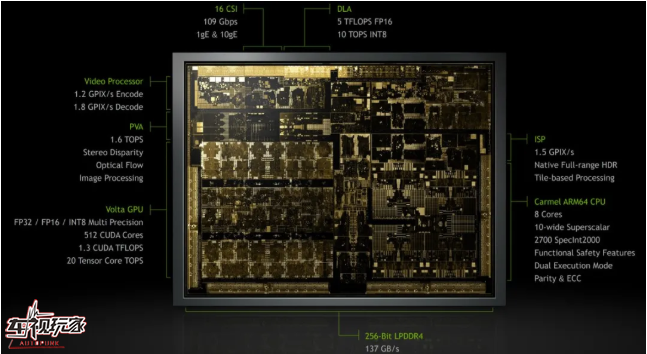
得益于架构更新和工艺制程的升级,拥有超过90亿个晶体管的 DRIVE Xavier 算力相比DRIVE PX 2 有着几倍的提升。它搭载了一颗 Tegra Xavier CPU 和一颗拥有 512 CUDA 核心的 Volta IGPU,在 INT8 精度下的算力可达 30 TFLOPS,也就是可以实现每秒30万亿次运算,可以说是车规级安全芯片中的又一个“超算”。
核心算法自研快速迭代
当然,足够高的算力只是给这套系统打好了基础,在这之上所运行的核心算法更是关键。
之前我们曾做过分析文章:拿来主义与半自主研发:从硬件分析威马Living Pilot/小鹏XPILOT谁更出彩?指出过小鹏G3所搭载的XPILOT选择了半自主开发的路子。详细来说,小鹏自主研发了最底层的线控、路径规划和控制部分,包括何小鹏多次在公开场合 PR 的自动泊车。
基于之前半自主开发积累的经验,在小鹏P7的XPLIOT 3.0中,实现了端到端的自研能力,包括涉及到感知、定位、规划、决策的核心算法,并依此实现基于实际数据的算法快速迭代。
举个例子, 在小鹏XPLIOT 3.0的一次测试中,发现感知系统漏掉了一个斑马线上走路的老奶奶。经过分析,发现是因为这个老奶奶拉了一个买菜的小车。对于XPLIOT的算法来说,一个拉着小车的行人既不符合行人的特征,也不符合自行车的特征,更不符合三轮车的特征,是一个新出现的东西,自然无法在模拟显示系统上显示出来。

查到问题所在之后,小鹏的研发人员立刻更新了算法,并通过OTA对车辆端的系统进行了更新,这时XPLIOT 3.0就可以识别到这类拉着小车的行人了。
这就是算法自研所带来的优势,可以快速响应、快速升级、快速部署。
丰富高精度的感知架构
上面是说的更多是一些核心方面的东西,但无论是算法还是计算平台所处理的原始数据都要来自车辆自身的感知系统。如果说计算平台是大脑的话,那么感知系统就是车辆的眼睛。

以特斯拉为例,它的感知系统包含:
1个前置三目摄像头
5个环视摄像头
1个前置毫米波雷达
12个超声波传感器
在AP系统中,对周围环境的感知主要来自车身上的5个环视摄像头,获取信息的方式主要是视觉(图像)信号,雷达信号只是作为超近或超远距离下的感知补充。

视觉信号的复杂程度和包含的数据量要远高于雷达信号,但从中进行识别和信息提取需要用特定的算法进行视觉处理,这也是为什么特斯拉 Hardware 2.0/3.0 的视觉处理能力非常强。
小鹏 XPLIOT 3.0 在感知系统上采用了与特斯拉相似的方案,也就是以视觉感知为主、多种传感器为辅。以小鹏P7为例,它的感知系统包含:
1个前置三目摄像头
1个前置单目摄像头
5个增强感知摄像头
4个环视摄像头
5个博世第五代毫米波雷达
12个超声波传感器
可见,小鹏 XPLIOT 3.0 的感知系统硬件要比特斯拉更丰富也更复杂。其中两套环车身视觉系统非常有趣,1个前置三目摄像头和5个增强感知摄像头主要用于自动驾驶的环境感知;而另外的一个前置单目摄像头和4个环视摄像头则主要用于360环影和行车记录。

这两套系统在理论上还可以互为冗余,当其中一套发生故障时,另一套可以通过特殊的算法接任视觉感知的工作,可以说是目前量产车中最复杂的视觉系统。
与计算平台的算法一样,丰富的传感器也是为了感知能力的冗余,以应对未来更高级算法的需求,这也是 XPLIOT 3.0 具有OTA升级到 XPLIOT 4.0 能力的原因。
除了自身的感知外,小鹏还强调了高精度地图的作用,不禁让人联想到阿里系出身的何小鹏是否会与同为阿里系的高德地图展开合作,这也是特斯拉这种外企相对难以企及的一个优势。
性能强劲的计算平台、精妙可控的算法、丰富的传感器,小鹏P7都有了,这也让它拥有了理论上可以向特斯拉Autopilot发起挑战的可能。
这里说它是“理论上”,是因为这套系统的表现目前也只是理论上的,买的人多了,在路上用的人、跑的人多了,有了消费者的口碑,才能知道小鹏尽心尽力的 XPLIOT 3.0 究竟处于一个什么水平。
当然了,当小鹏P7上市后我们也会第一时间对其进行电动知士TEST的标准化测试,届时我们也会从更专业的角度来为大家评析,小鹏的 XPLIOT 3.0水平如何,以及它到底能不能向特斯拉Autopilot发起挑战。